要点
- 繊細な操作性と術者の負担軽減を両立させた手術支援ロボットのマスタマニピュレータを開発した。
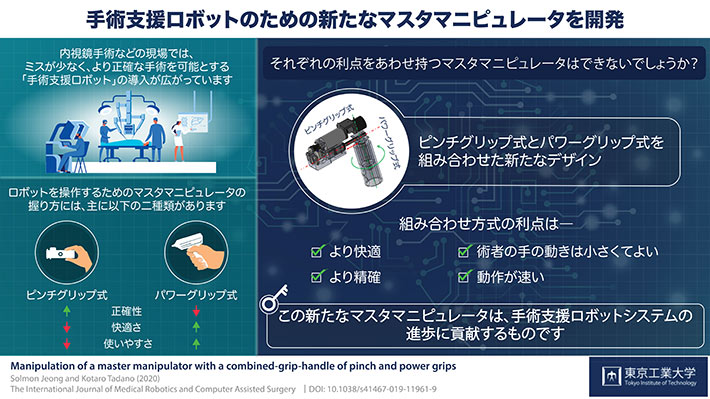
- 開発したマスタマニピュレータは現在の主流であるピンチグリップ式とパワーグリップ式を組み合わせたもので、従来のタイプよりも高いパフォーマンスを示した。
- より微細な位置制御が必要な手術支援ロボットへの応用が期待される。
概要
東京工業大学 科学技術創成研究院 未来産業技術研究所の只野耕太郎准教授と工学院 機械系のSolmon Jeong(ソルモン・ジョン)大学院生(博士後期課程2年)は、手術の精度と術者の負担軽減を両立する新たな手術支援ロボットシステムを開発した。
手術支援ロボットは、術者が自分の手元のマスタマニピュレータを動かすことで、患者の体内に挿入されたスレーブマニピュレータを操作するマスタ・スレーブ式が一般的である。マスタ・スレーブ式手術支援ロボットの手元の操作は、親指と人差し指で摘まむピンチグリップ式と、手のひら全体でマスタマニピュレータを握るパワーグリップ式がある。ピンチグリップ式は繊細な作業に適しているが術者への負担が大きく、パワーグリップ式は繊細な作業ではピンチグリップ式に劣るが、術者への負担は小さい。そこで研究グループは、ピンチグリップとパワーグリップを組み合わせることによって、繊細かつ負担の小さいマスタマニピュレータを新たに開発した。
研究成果は2019年12月12日に「The International Journal of Medical Robotics and Computer Assisted Surgery」のオンライン版に掲載された。
背景と経緯
近年、内視鏡下手術において手術支援ロボットの使用が増加しており、さまざまな医療分野での活用が広がっている。手術支援ロボットでは、術者が自分の手元のマニピュレータを操作することで、患者の体内に挿入されたマニピュレータを操作する「マスタ・スレーブ」と呼ばれる操作方式が一般的である。マスタ・スレーブシステムでは、操作者の動きを入力する機器を「マスタ機」、マスタ機の制御下で動作する機器を「スレーブ機」と呼び、手術支援ロボットの場合は、術者の手元のマニピュレータがマスタ機、患者の体内に挿入されたマニピュレータがスレーブ機にあたる。
手術支援ロボットによる手術では、実際に手で執刀するよりも小さなスケールで手術を行うことから、スレーブ機の位置制御の高精度化は非常に重要である。スレーブ機は微細な手術操作を行うことから、マスタ機の動作はスレーブ機に縮小して伝えられる。そのため、マスタ機の操作においては余分に大きな動きが必要であり、手術中にはマスタ機とスレーブ機の可動範囲や位置関係の調整が必要という問題がある。
手術支援ロボットにおけるマスタ機の操作は、親指と人差し指で摘まむピンチグリップ式と、手のひら全体で握るパワーグリップ式がある。ピンチグリップ式は繊細な作業に適しているが手指への負担が大きく、逆にパワーグリップ式は繊細な作業ではピンチグリップ式に劣るが、術者に対する負担は小さい。そこで研究グループは、位置決めの正確さに加え、快適な操作性を実現するために、ピンチグリップとパワーグリップの相対位置を可変に組み合わせた新たなグリップ方式を提案し、これを実装したマスタマニピュレータの開発を行った。
研究成果
本研究では、ピンチグリップとパワーグリップの「組み合わせ式グリップ」の設計に向け、まず、親指と人差し指の指先でピンセット状になっている部分を摘まみ、残りの指と手のひら全体でパワーグリップ部分を握って操作する検証モデルを試作した(図1)。検証モデルは、指先の方向と手のひらで握り込むグリップの距離や角度が可変であるものと固定のものなど4種類作成し、糸を結ぶタスクにかかる時間および必要とされる動作を調べた。その結果、可変機構を持つモデルでは、固定の場合に比べタスクに要する時間も動作も少ないことがわかった。


図1. ピンチグリップとパワーグリップの組み合わせ検証モデル
そこで研究グループは、検証モデルで得られた予備的な結果に基づいて、ピンチグリップとパワーグリップを組み合わせ、指先とパワーグリップ部の角度と距離を可変としたグリップ機構を開発した(図2、3)。このグリップ機構は、パワーグリップ部から30~50 mmの範囲であれば、腕そのものを動かすことなく、前後左右に指先を動かすことができる。

図2. 本研究で開発したピンチグリップとパワーグリップの組み合わせによるグリップ機構

図3. 同平面図。グリップ部分から30~50 mmの範囲であれば、腕そのものを動かすことなく、指先を動かすことができる。
実際の外科手術においては高い位置決め精度が重要であるため、開発した組み合わせ式グリップを採用したマスタマニピュレータと、従来のパワーグリップ式およびピンチグリップ式のマスタマニピュレータのそれぞれを用いてポインティング実験[用語1]を行い、位置制御操作性能を比較した。また、マスタ機の動作をスレーブ機の動作に縮小して変換する比率(スケールファクタ[用語2] )がスレーブ機の位置制御に与える影響についても検討した。
その結果、失敗の頻度、所要時間、手の移動距離による操作性評価が、パワーグリップ式ではスケールファクタが大きい(マスタ機からスレーブ機への動きの縮小度合いが大きい)場合に、ピンチグリップ式ではスケールファクタが小さい場合に比較的優れる傾向であったのに対し、提案する組み合わせ式では、いずれの場合においてもより優れたパフォーマンスを示した。このことは、提案する組み合わせ式グリップ機構が、パワーグリップとピンチグリップ両者の長所を兼ね備えているとともに、スケーリングファクタを大きくせずとも、人の手が本来有している器用さを活かすことで微細なスケールにおける作業を可能とするものであることを示唆している。
今後の展開
本研究で開発した組み合わせ式のマスタマニピュレータは、微細なスケールにおいて従来の方式よりも優れたパフォーマンスを示したことから、より微細な位置制御が必要となる手術支援ロボットへの応用が期待される。
用語説明
[用語1] ポインティング実験 : マニピュレータの先端などを操作し、事前に指定した位置に対してどの程度正確に向かうことができるかを調べることで、位置制御の性能を評価する実験。
[用語2] スケールファクタ : ある対象から異なる対象に大きさを縮小して変換する際の比を表す量。
論文情報
掲載誌 : |
The International Journal of Medical Robotics and Computer Assisted Surgery |
論文タイトル : |
Manipulation of a master manipulator with a combined-grip-handle of pinch and power grips |
著者 : |
Solmon Jeong and Kotaro Tadano |
DOI : |

- プレスリリース 繊細な操作性と術者の負担軽減を両立させた手術支援ロボットのマニピュレータを開発 ―より微細なスケールの手術支援ロボットへの応用に期待―
![PDF]()
- 世界初、空気圧駆動型内視鏡ホルダーロボット発売―大学発ベンチャーによる革新的手術支援ロボット―|東工大ニュース
- 動画で見る東工大研究 ~Tokyo Tech Research 『手術支援ロボット』|東工大ニュース
- 国産手術支援ロボットシステムを事業化 ―文部科学省START事業発のベンチャー企業の設立―|東工大ニュース
- 医工連携から生まれた手術支援ロボットを自分たちの手で世に送り出す喜び ― 只野耕太郎|研究ストーリー|研究
- 個性豊かな東工大のロボットたち ―水中や高所探索、手術支援、人工筋肉など―|研究ストーリー|研究
- 只野研究室
- 研究者詳細情報(STAR Search) - 只野 耕太郎 Kotaro Tadano
- 工学院 機械系
- 科学技術創成研究院 未来産業技術研究所
- 研究成果一覧

お問い合わせ先
東京工業大学 科学技術創成研究院 未来産業技術研究所
准教授 只野耕太郎
E-mail : tadano.k.aa@m.titech.ac.jp
Tel : 045-924-5032
取材申し込み先
東京工業大学 広報・社会連携本部 広報・地域連携部門
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661