要点
- 長崎ペンギン水族館にて、羽ばたいて前進遊泳するペンギンを最大14台の水中ビデオカメラで同時撮影。取得した動画により、世界で初めてペンギン遊泳の3次元運動解析を行い、推進力発生メカニズムを解明。
- ペンギンの翼が羽ばたき中に曲げ変形することを初めて計測し、その曲げ変形が推進効率を約80%向上させることを流体力学計算により推定。
- ペンギンを模倣した、しなやかな羽ばたき翼による新しい水中推進ロボットへの応用に期待。
概要
東京工業大学 工学院 機械系の原田夏輝大学院生(修士課程2年)と田中博人准教授らは、ペンギンが水中で羽ばたいて前進する様子を長崎ペンギン水族館にて最大14台の水中ビデオカメラで同時撮影し、世界初の3次元運動解析を行って推進力発生メカニズムを明らかにした。
ペンギンは左右の翼を複雑に動かして推進する。その3次元運動解析には、水中で多方向から同時に広範囲を高解像度で撮影する必要がある。その困難さから、これまでペンギンの羽ばたき遊泳の3次元運動解析が行われたことはなく、遊泳中の翼がどのように動き、どのように推進力が生まれるのか、その詳細は明らかではなかった。
本研究により体と翼の詳細な動きが初めて明らかになった。その結果、翼の打ち上げと打ち下ろし[用語1]が、それぞれほぼ等しい推進力を発生することが分かった。さらに、翼が打ち上げ中に曲げ変形することを発見し、これが推進効率を約80%向上させることを流体力学計算により推定した。
今回の研究結果は、俊敏な水中遊泳(旋回や加減速など)を可能にするペンギンの翼の複雑な動作メカニズムの解明や適応進化の理解に貢献するもので、今後、ペンギンの羽ばたきを模倣(バイオミメティクス、生物模倣)することで、推進効率の良い水中ロボット開発にも役立つことが期待される。
この研究成果は、Journal of Experimental Biology 電子版にて、現地時間11月3日に掲載された。
研究成果
原田夏輝大学院生と田中博人准教授らは、長崎ペンギン水族館の協力の下、羽ばたいて前進するジェンツーペンギンの3個体を最大14台の水中ビデオカメラで撮影した。取得した画像を用いて3次元運動解析を行い、翼(よく)と胴体の運動および翼変形を計算した(図1)。また、翼の縮小模型を3Dプリンタで製作して、回流水槽で翼模型の流体力を計測し、ペンギン翼の流体力学的な翼特性を取得した。これらの遊泳中の運動と翼変形および翼特性を統合して、遊泳中に翼が発生する流体力を計算し、推進力(前進方向の力)の発生メカニズムを調べた。
Clik here to view.
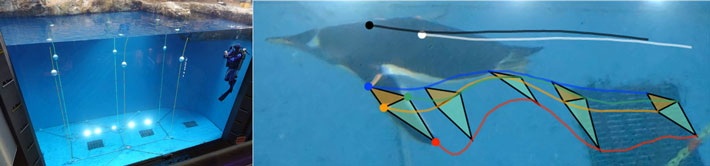
- 図1
- 水槽内にチェーンと浮きで構築した計測空間(左)と、取得した画像上での羽ばたき1周期中の解析部位の軌跡と翼形状の例(右)。
その結果、ペンギンの翼は、打ち上げと打ち下ろしが、それぞれほぼ等しい推進力を発生することが分かった。これは、空中を飛翔する鳥が打ち下ろし時に打ち上げ時よりも大きな力を発生するのとは異なる。
また翼は、打ち上げ時に下向き(腹側)に大きく(20度以上)曲がることが分かった(図2(左))。打ち下ろし時の曲げ変形は、上向き(背側)で小さかった(約10度)(図2(右))。
Clik here to view.
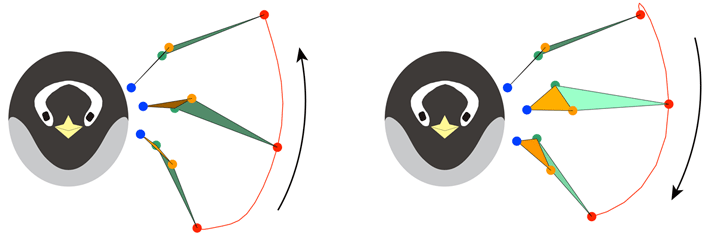
- 図2
- 正面から見た打ち上げ中の翼形状(左)と打ち下ろし中の翼形状(右)の例。
さらに、翼の曲げ変形がある場合と、翼の曲げ変形仮想的に無くして平坦にした場合とで、発生する推進力と効率を比較した(図3)。その結果、翼の曲げ変形は、推進力をほぼ保ったまま推進効率を約80%向上させた。これは、しなやかな翼の変形が、水中での効率的な羽ばたき推進に貢献することを示唆する。
Clik here to view.
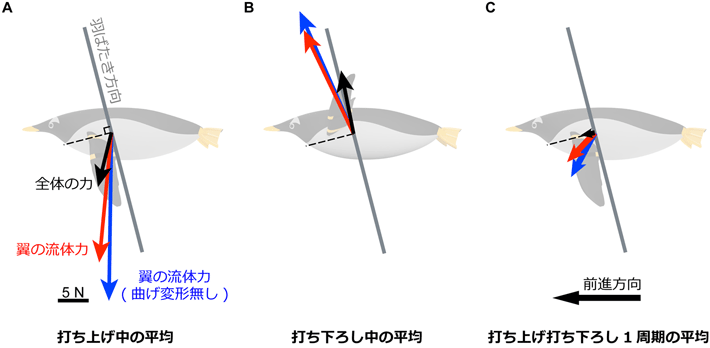
- 図3
- ペンギンに働く力の打ち上げ中の平均(A)、打ち下ろし中の平均(B)、および打ち上げと打ち下ろしの1周期の平均(C)(黒矢印:体の質量と加速度から計算した全体の力。赤矢印:翼の運動から計算した、翼が発生する流体力。青矢印:翼が曲げ変形しないと仮定して計算した、翼が発生する流体力)。曲げ変形が無いと仮定した場合の翼の流体力(青矢印)は、打ち上げと打ち下ろしでの下・上方向の成分は増加するが(A, B)、1周期での前進方向の成分(推進力)は若干減少するため(C)、推進効率が低下する。
動画
背景
ペンギンは水中遊泳に適応して進化した鳥類であり、翼を羽ばたかせて推進する。これまでペンギンの遊泳については、野生環境での生態が数多く調査され、速い遊泳速度や深い潜水深度などの優れた遊泳能力が知られてきた。しかし「翼は水中でどのように動き、どのように推進力が生まれるのか」という推進メカニズムの研究は数少なく、理解は限定的だった。また「翼は変形するのか?変形は推進に影響するのか?」という疑問への答えは、未知だった。さらに「なぜ鳥類(ペンギン)が水中に進出して繁栄できたのか」という生物学的な問いに対しても、推進メカニズムに不明点が多かったために、答えは明確ではなかった。
今後の展開
今回の研究で明らかにした前進遊泳での推進メカニズムに基づいて、ペンギンが旋回や加減速などの俊敏な遊泳を実現するメカニズムの研究に展開したい。さらに、ペンギンの羽ばたきを模倣(バイオミメティクス、生物模倣)した俊敏で効率的に泳ぐ水中遊泳ロボットへの応用が期待される。
用語説明
[用語1] 打ち上げと打ち下ろし : 打ち上げは、腹側から背側への羽ばたき。打ち下ろしは、背側から腹側への羽ばたき。
論文情報
掲載誌 : |
Journal of Experimental Biology |
論文タイトル : |
Kinematics and hydrodynamics analyses of swimming penguins: wing bending improves propulsion performance |
著者 : |
Natsuki Harada, Takuma Oura, Masateru Maeda, Yayi Shen, Dale M. Kikuchi, Hiroto Tanaka |
DOI : |
- プレスリリース ペンギンが翼をしなやかに変形させ、効率よく泳ぐメカニズムを解明 —ペンギン型水中推進ロボットへのバイオミメティクス応用に期待—
- BSフジ「ガリレオX」に工学院の田中博人准教授が出演|東工大ニュース
- 生物から学ぶ新技術 深化するバイオミメティクス |ガリレオX 第226回 - YouTube ガリレオCh
- 田中博人研究室
- 研究者詳細情報(STAR Search) - 田中博人 Hiroto Tanaka
- 工学院 機械系
- 研究成果一覧
Image may be NSFW.
Clik here to view.
工学院 ―新たな産業と文明を拓く学問―
2016年4月に発足した工学院について紹介します。
学院・系及びリベラルアーツ研究教育院Image may be NSFW.
Clik here to view.
お問い合わせ先
東京工業大学 工学院 機械系
准教授 田中博人
E-mail : tanaka.h.cb@m.titech.ac.jp
Tel : 03-5734-2114
取材申し込み先
東京工業大学 総務部 広報課
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661