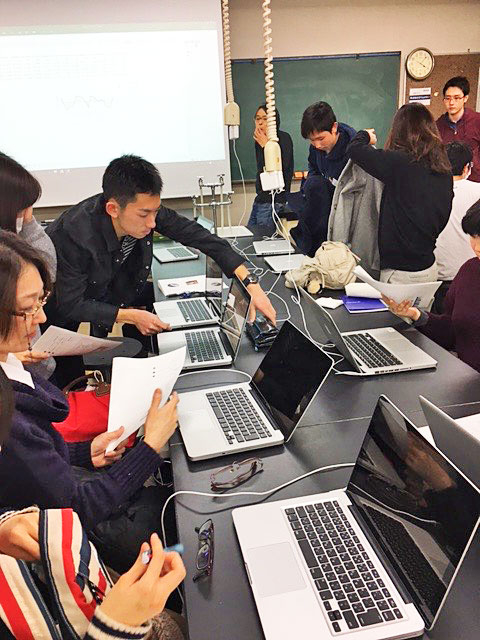
工学院、物質理工学院、環境・社会理工学院が開講する国際大学院プログラム「サステナブル エンジニアリング プログラム(Sustainable Engineering Program(SEP))」の最重要科目の1つとして2016年12月から2017年1月にかけて開講された「サステナブル エンジニアリング テクノロジー(Sustainable Engineering Technology (SET))」と、それに付随したサテライトセミナーが2月22日~23日にかけて1泊2日で行われました。今回のセミナーは2008年の第1回から数えて記念すべき10回目であり、世界17ヵ国からの履修学生45名、TA8名、先生方7名が参加しました。

写真1. 巨大ダンプトラック前の集合写真
サステナブル エンジニアリング テクノロジーは、持続可能な開発に関して幅広く見識を有する世界で活躍できるエンジニアを養成することを目的としており、全6回の講義とサテライトセミナーで構成されています。6回の講義のうち、最初の4回は電力中央研究所(以下、CRIEPI)の専門家から、エネルギーと環境、需要面に関する省エネ技術や、クリーンな石炭火力発電技術、熱水力学の観点からみた原子炉システムの安全性に関して学びました。
また、今年度の授業テーマは、「Energy and Innovation for Infrastructure Development(エネルギーとインフラ開発に関する技術革新)」であることから、5、6回目では株式会社小松製作所(以下、コマツ)の研究者が、コマツのイノベーション・成長戦略に関する講義を行いました。これらの講義を踏まえた上でサテライトセミナーが行われ、本セミナーでは、1日目にコマツ茨城工場の見学を、2日目に授業テーマに関するグループワークの成果発表会を行いました。
コマツ茨城工場を訪問した際には、ダンプトラック、ホイルローダーといった日頃見ることのない大型重機の生産ラインを実際に見学することができ、非常に貴重な機会となりました。少人数で効率的に生産できるように上手く分業・自動化がなされているとともに、発注者ごとの需要に対応できるよう、人の手で行う作業と機械で行われる作業のバランスを上手くとっている印象を強く受けました。
![コマツ茨城工場見学前の説明]()
写真2. コマツ茨城工場見学前の説明
![セミナー初日、各グループ夜遅くまで発表の準備を行った]()
写真3. 発表後のQ&Aセッション


コマツ茨城工場の見学後にセミナー用の宿泊施設に移動し、夕食時には17ヵ国からの参加者が自国を紹介する時間が設けられました。各国の学生がそれぞれの国の魅力や文化を紹介し、改めて参加メンバーの国際性、多様性を感じました。夕食後には、翌日のグループワークの成果発表に向けて、各班夜遅くまで準備・最終調整を行っていました。
グループワークでは、国籍や専門分野の異なる学生5~6名とTA1名で構成されるグループが、今年度の授業テーマであるエネルギーとインフラ開発に関する技術革新に関する課題に取り組みました。
セミナー2日目には、朝からグループワークの成果発表会が行われました。全8グループがそれぞれのテーマ(下表)について発表したのですが、顧客とコンサルタント間での対話形式の寸劇として発表を行ったグループもあれば、既存のアイデアにとらわれず斬新なアイデアを提案・検証するグループもあり、いずれも特有の面白さのある発表でした。各グループ15分間の発表後には、10分間の質疑応答が行われましたが、どのグループの発表でも、様々な視点から鋭い質問があがり、活発な議論が行われました。

写真4. セミナー初日、各グループ夜遅くまで発表の準備を行った
グループ発表のタイトル
グループ |
タイトル |
|---|---|
1 |
スマート都市のための廃棄物マネジメント(Novel Municipal Solid Waste Treatment Management - Case of Megacities) |
2 |
ハウスリボーン - ビル再生のための新提案(HOUSE REBORN - New Solutions to Building Reconstruction) |
3 |
スマートインフラストラクチャーとIoT(IoT for Smart Infrastructure) |
4 |
持続可能社会に貢献するスマートステーション(Smart Train Station as Part of Sustainable Society) |
5 |
スマート交通システム(Smart Transportation System) |
6 |
未来家屋 ― 新たなライフスタイルと家(House of the Future - A new style of house and life-style -) |
7 |
日本の環境に適したスマートホーム(Smart Home Construction for Japanese Environment) |
8 |
グリーンコンストラクションとその評価基準(Setting the criteria for evaluating green construction sites) |
発表会の最後には、教員とTAの投票により、優秀発表賞として3グループと、活発に質問を行った3名が選定・表彰され教員から講評を頂き、サテライトセミナーは幕を閉じました。

写真5. セミナー会場でのグループ写真
参加学生のコメント
澤村 新之介さん(環境・社会理工学院 融合理工学系 修士課程1年)
日本にいながら、様々な国籍を持つメンバー、また専門の異なるメンバーと一緒に何かを行うということはそうないため、本講義での多様な国籍・専門の学生とのグループワークは、非常に刺激的でした。困難に直面する場面も多くありましたが、その中でも各メンバーのユニークさ・得意なことを上手く活かし掛け合わせて、何とか1つの発表として完成できたことは、とても良い経験だったと思います。このような貴重な機会を提供してくださった、電力中央研究所およびコマツの非常勤講師の先生方、見学会でお世話になりましたコマツ茨城工場の方々、本学の先生方に、感謝します。